
About
I am an incoming PhD in the Dept. of ECE at Clemson University, advised by Prof. Luyang Zhao. And I am currently a Research Engineer at TARS Robotics, working with Prof. Wenchao Ding and Prof. Yilun Chen. Previously, I was fortunate to work closely with Prof. Xiaoxiao Long from NJU, Prof. Ping Tan from HKUST, and Prof. Hao Zhao from DISCOVER Lab. I was a visiting student at the Institute of Automation, Chinese Academy of Sciences in my senior year.
My long-term research goal is to build Embodied Intelligence with Dexterous Manipulation and Flexible Mobility. It should be able to perceive and imagine the real world, then derive insights through understanding to guide the action. I am currently focusing on {Robotics, 3D Vision, Graphics} for Embodied AI:
- 🤖 Robotics
Manipulation; Foundation Models for Robotics; Autonomous Driving. - 👀 3D Vision
3D Scene Understanding (e.g.visual grounding, dense captioning, VQA); Robot Perception;Anomaly Detection. - 🪅 Graphics
3D Reconstruction and Editing for Simulation; Digital Twins; World Models.
News
2025
August
🎉 Our work RoboGEM is accepted by ACM MM 2025, RoboSoft'25 workshop as an Oral Presentation!
2025
August
🏆 We have released tech report of champion solution for WBCD Challenge.
2025
May
🇺🇸 I will participate the IEEE ICRA 2025 in person, see you in Atlanta!
2024
2024
October
🇮🇹 I will participate the ECCV 2024 in person to present our work TOD3Cap, see you in Milano!
Publications
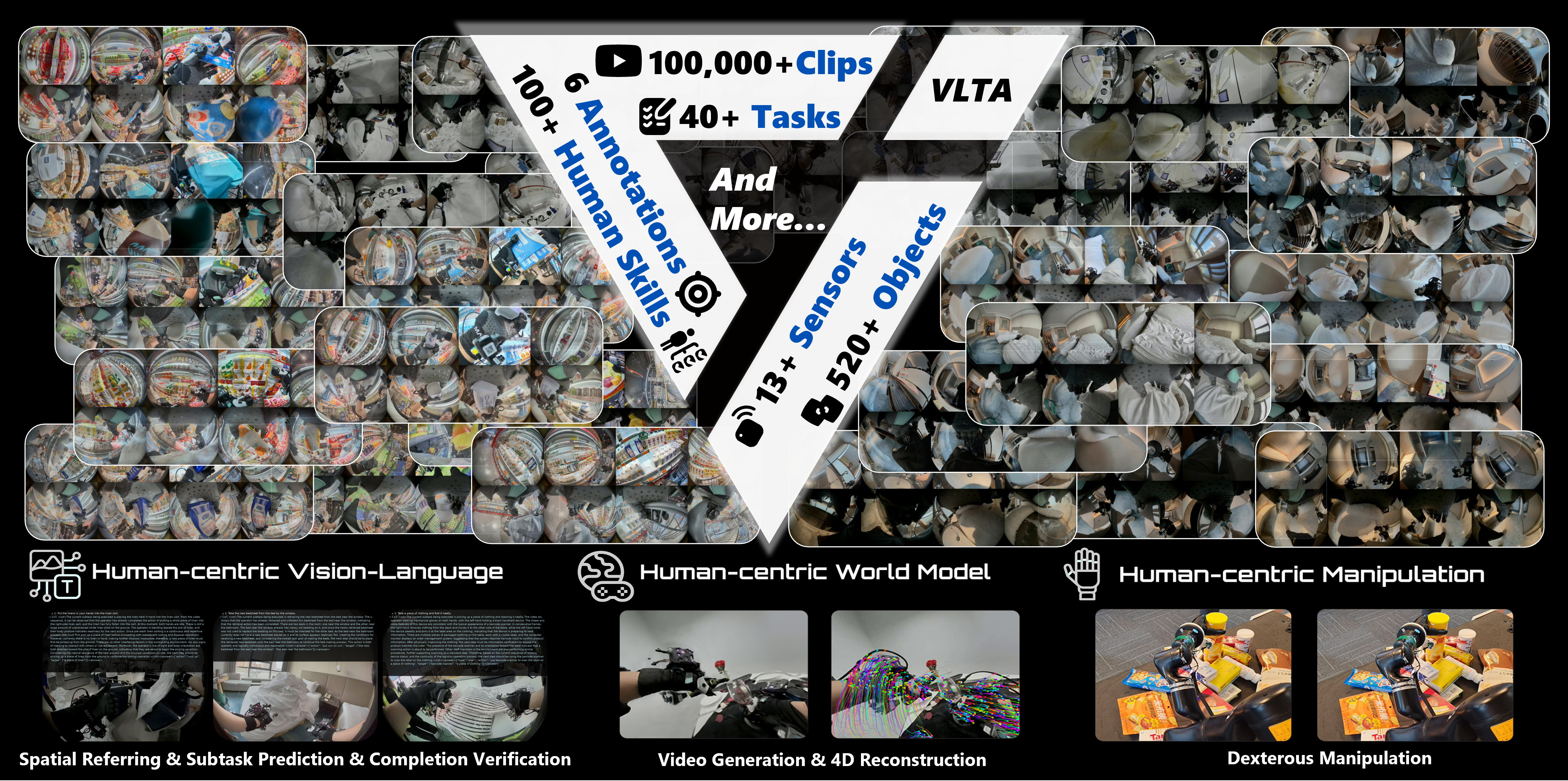
World in Your Hands: A Large-Scale and Open-source Ecosystem for Learning Human-centric Manipulation in the Wild
Yupeng Zheng*,
Jichao Peng*,
Weize Li*,
Yuhang Zheng,
Xiang Li,
Yujie Jin, Julong Wei, Guanhua Zhang, Ruiling Zheng, Ming Cao, Songen Gu, Zhenhong Zou, Kaige Li, Ke Wu, Mingmin Yang, JiahaoLiu, Pengfei Li, Hengjie Si, Feiyu Zhu, Wang Fu, Likun Wang, Ruiwen Yao,
Jieru Zhao,
Yilun Chen,
Wenchao Ding.
Submission
World in Your Hands is a large-scale, 1,000-hour human-centric manipulation dataset and benchmark suite that greatly improves the understanding of bimanual dexterous manipulation and interaction.
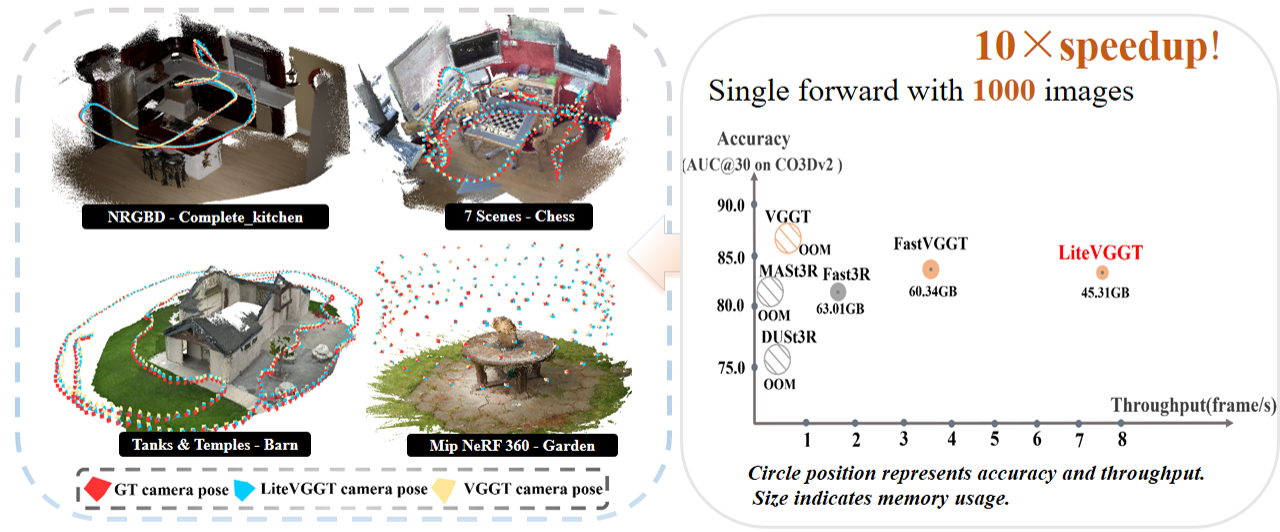
LiteVGGT: Boosting Vanilla VGGT via Geometry-aware Cached Token Merging
Zhijian Shu,
Cheng Lin,
Tao Xie,
Wei Yin,
Ben Li,
Zhiyuan Pu,
Weize Li,
Yao Yao,
Xun Cao,
Xiaoyang Guo
Xiao-xiao Long.
Submission
LiteVGGT speeds up VGGT by up to 10× with far lower memory cost through geometry-aware cached token merging, enabling efficient 3D reconstruction on 1000-image scenes with minimal accuracy loss.
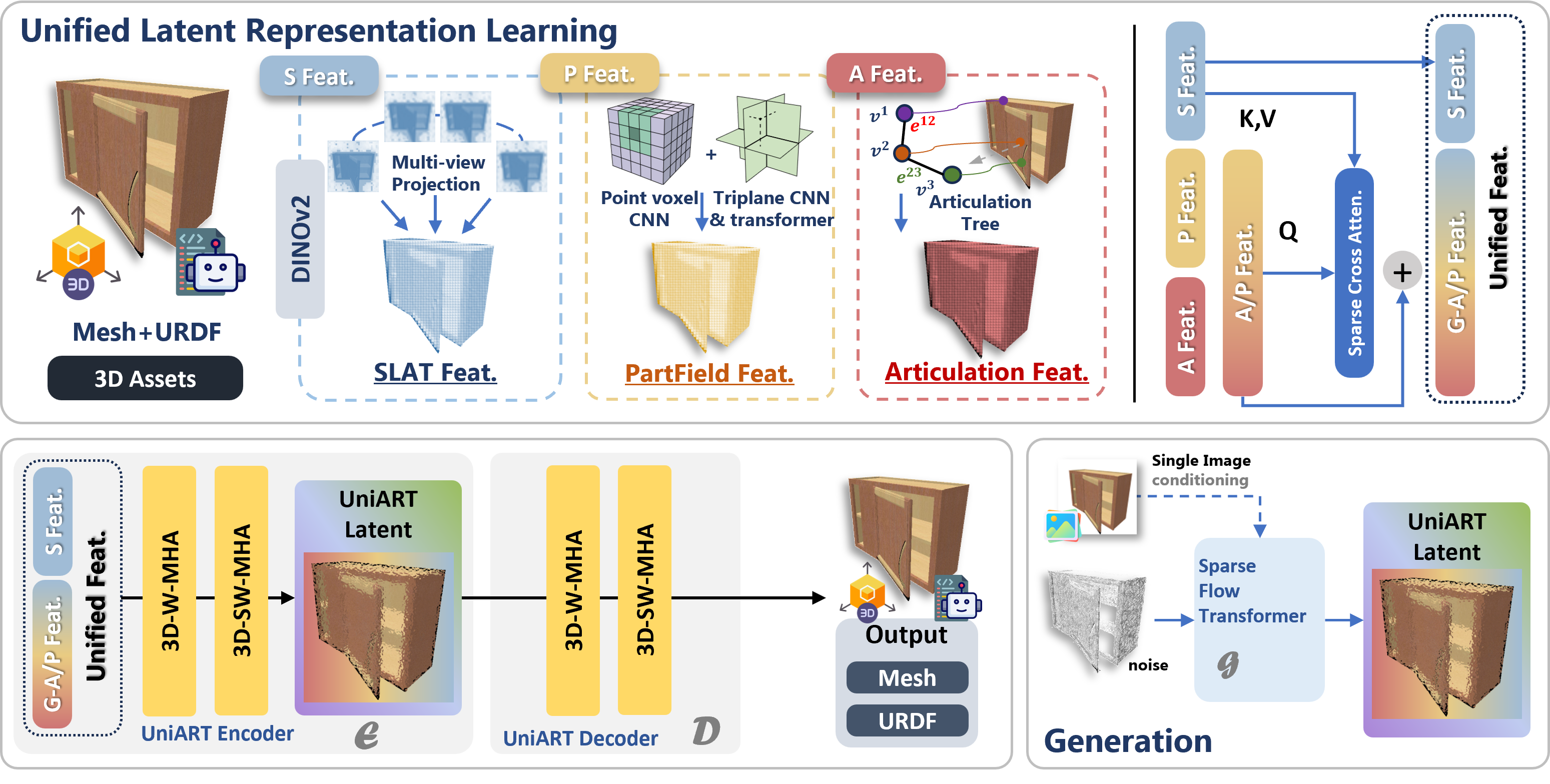
UniArt: Unified 3D Representation for Generating 3D Articulated Objects with Open-Set Articulation
Bu Jin,
Weize Li,
Songen Gu,
Yupeng Zheng,
Yuhang Zheng,
Zhengyi Zhou,
Yao Yao.
Submission
UniArt generates fully articulated 3D objects from a single image using a unified diffusion model that jointly learns geometry, appearance, parts, and joint motions.
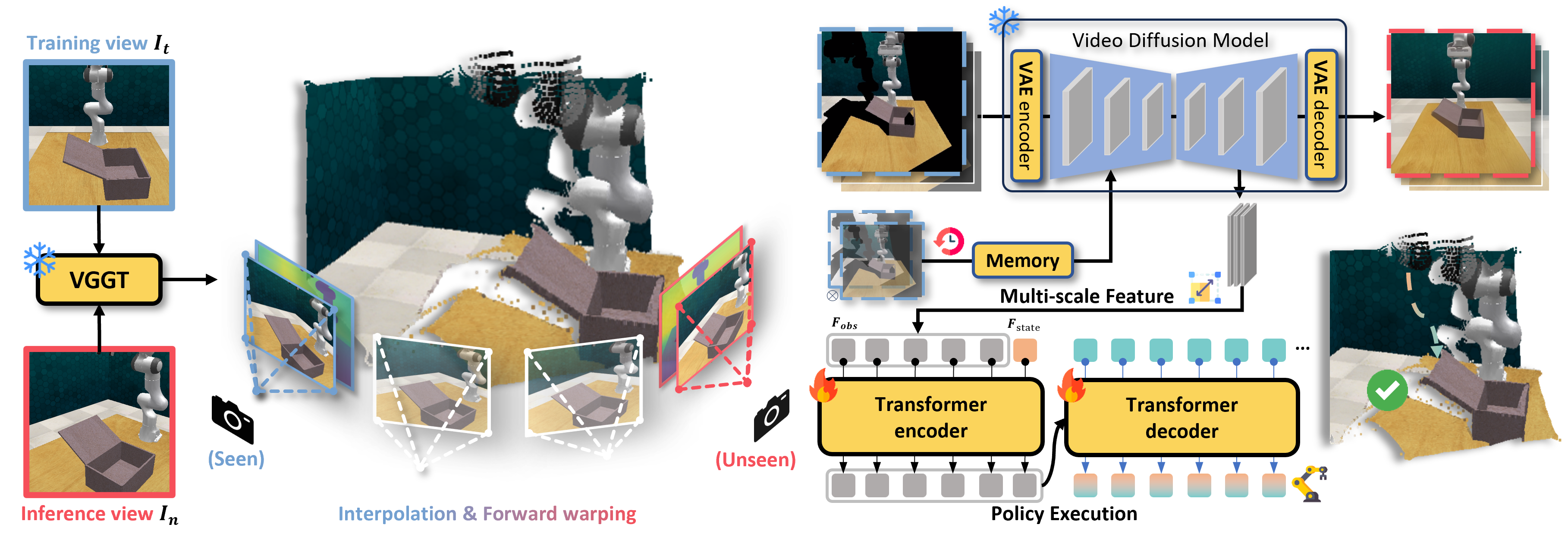
VistaBot: View-Robust Robot Manipulation via Spatiotemporal-Aware View Synthesis
Songen Gu,
Yupeng Zheng,
Yuhang Zheng,
Weize Li,
Yating Feng,
Xiang Li,
Pengfei Li,
Yilun Chen,
Wenchao Ding.
Submission
VistaBot makes robot manipulation robust to camera viewpoint changes by combining 4D geometry with video diffusion models—no camera calibration needed.

Taming VR Teleoperation and Learning from Demonstration for Multi-Task Bimanual Table Service Manipulation
Weize Li,
Zhengxiao Han,
Lixin Xu,
Xiangyu Chen,
Harrison Bounds,
Chenrui Zhang,
Yifan Xu.
Technical Report, 2025 - 1st Place Prize Solution
We won the ICRA 2025 WBCD Table Service Track with a champion solution that combines VR teleoperation and Learning from Demonstrations for efficient and reliable bimanual robot manipulation.

RoboGEM: Learning Language-guided Robotic Manipulation via Generalizable and Efficient Feature Distillation
Chunzheng Wang,
Yuhang Zheng,
Xiangyu Chen,
Weize Li,
Songen Gu,
Yupeng Zheng.
ACM International Conference on Multimedia (ACM MM), 2025 - Oral Presentation
RoboSoft'25 Workshop
RoboGEM is a generalizable and efficient 3D representation that empowers robots to perform diverse manipulation tasks with speed and robustness.
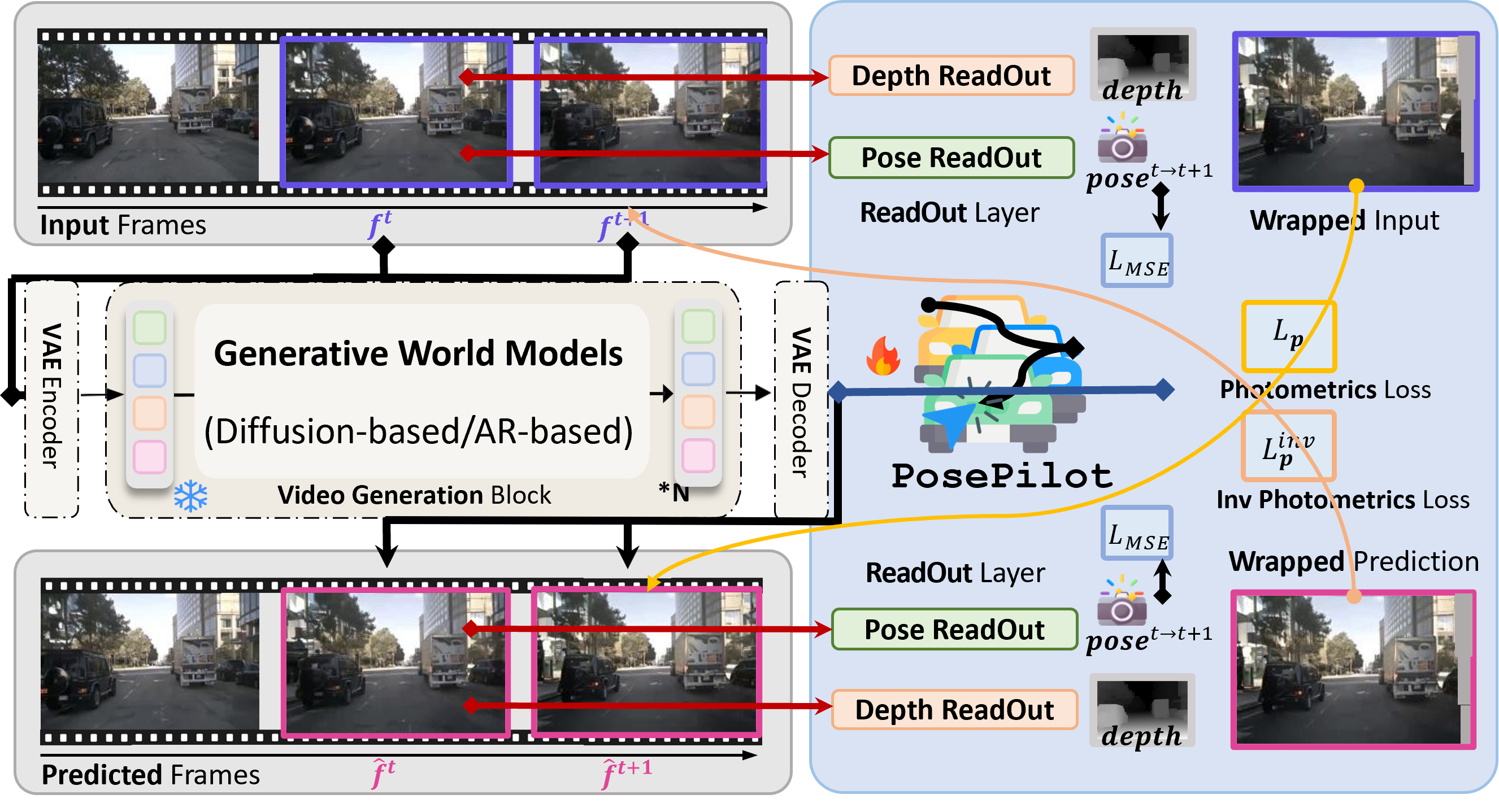
PosePilot: Steering Camera Pose for Generative World Models with Self-supervised Depth
Bu Jin*,
Weize Li*,
Baihan Yang,
Zhenxin Zhu,
Junpeng Jiang,
Huan-ang Gao,
Haiyang Sun,
Kun Zhan,
Hengtong Hu,
Xueyang Zhang,
Peng Jia,
Hao Zhao.
International Conference on Intelligent Robots and Systems (IROS), 2025 - Oral Presentation
PosePilot is a lightweight framework that enhances camera pose controllability in generative world models, enabling precise, consistent, and adaptable viewpoint synthesis for autonomous driving and beyond.

Radiance Field-Based 3D Editing: A Survey
Weize Li*,
Tianshu Kuai*,
Huan-ang Gao,
Xiangyue Liu,
Yuhang Zheng,
Yupeng Zheng, etc.
In Submission
This survey reviews recent advances, methods, datasets, and applications in Radiance Field-based 3D Editing, highlighting challenges and future directions.
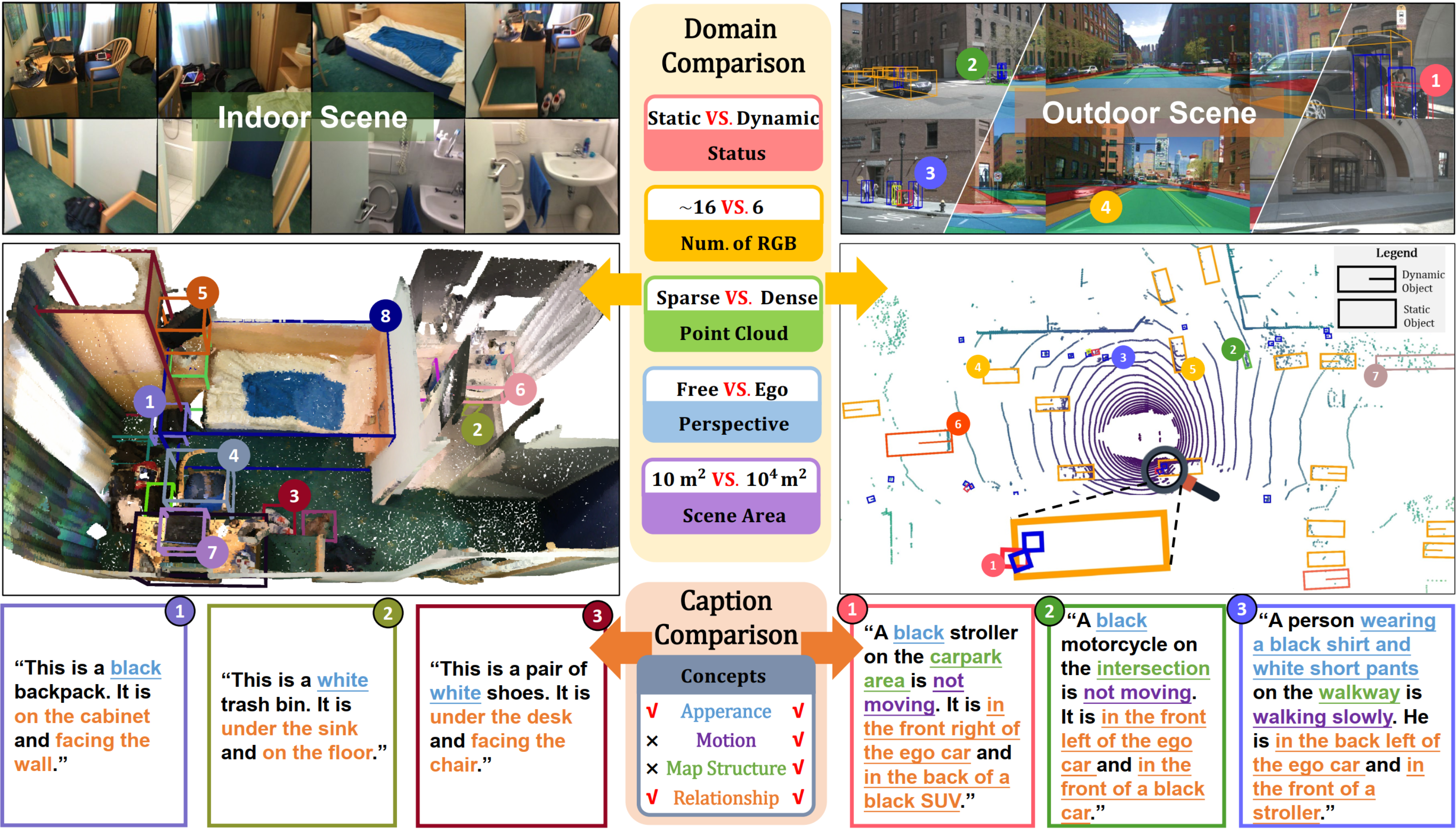
TOD3Cap: Towards 3D Dense Captioning in Outdoor Scenes
Bu Jin,
Yupeng Zheng†,
Pengfei Li,
Weize Li,
Yuhang Zheng,
Sujie Hu,
Xinyu Liu,
Jinwei Zhu,
Zhijie Yan,
Haiyang Sun,
Kun Zhan,
Peng Jia,
Xiaoxiao Long,
Yilun Chen,
Hao Zhao.
European Conference on Computer Vision (ECCV), 2024 - Poster
We introduce TOD3Cap, a benchmark dataset and network for outdoor 3D dense captioning, enabling accurate object localization and rich natural language descriptions from LiDAR and panoramic images.
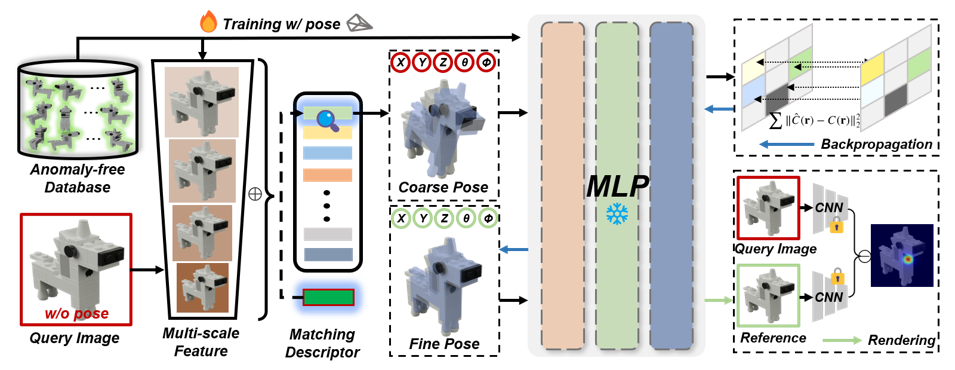
PAD: A Dataset and Benchmark for Pose-agnostic Anomaly Detection
Qiang Zhou*,
Weize Li*,
Lihan Jiang,
Guoliang Wang,
Guyue Zhou,
Shanghang Zhang,
Hao Zhao.
Neural Information Processing Systems (NeurIPS), 2023 - Poster
Dataset & Benchmark Track
We introduce the MAD dataset, PAD benchmark, and OmniposeAD method to tackle pose-agnostic object anomaly detection with diverse 3D anomalies and standardized evaluation.
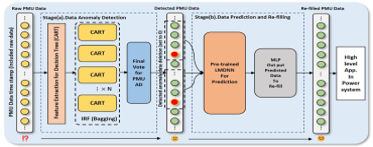
IRFLMDNN: Hybrid Model for PMU Data Anomaly Detection and Re-filling with Improved Random Forest and Levenberg Marquardt Algorithm Optimized Dynamic Neural Network
Miao Yu†,
Chenyu Yang*,
Weize Li*,
Weijie Du,
Jinglin Li.
Neural Computing and Application, 2023
We propose IRFLMDNN, a hybrid model combining random forests and dynamic neural networks for accurate anomaly detection and adaptive data refilling in PMU time series.
Other Projects
ICRA 2025 What Bimanuals Can Do (WBCD) Challenge
Weize Li,
Zhengxiao Han,
Lixin Xu,
Xiangyu Chen,
Harrison Bounds,
Chenrui Zhang,
Yifan Xu.
🏆The 1st Place in Table Services Track
In the Table Services track, we tackled a series of demanding tasks under strict requirements for speed, precision, and reliability: unfolding a tablecloth (deformable-object manipulation), placing a pizza into the container (pick-and-place), and opening and closing a food storage box.
Research Experience
TARS Robotics
Jan 2025 - Present · Research Engineer
Research Area: Human-centric Embodied AI; Foundation Models for Robotics; Manipulation.
Supervisors: Prof. Wenchao Ding & Prof. Yilun Chen

AIR Innovation Center, Tsinghua University
Jan 2025 - Present · Research Assistant
Research Area: Robotic Manipulation; Visual Representation for Robotics; Zero-shot 3D Reasoning.
Supervisors: Prof. Yilun Chen

LightIllusions
April 2024 - Oct 2024 · Research Intern
Research Area: Robotic Manipulation
Supervisors: Prof. Xiaoxiao Long & Prof. Ping Tan
![]()
Institute for AI Industry Research (AIR), Tsinghua University
Aug 2022 - Dec 2024 · Research Intern & Research Assistant
Research Area: 3D Scene Understanding; Visual Reasoning; Anomaly Detection
Supervisor: Prof. Hao Zhao & Prof. Shanghang Zhang
Education
Institute of Automation, Chinese Academy of Sciences
Feb 2022 - Aug 2022 · Visiting Student
Research Area: Computer Vision & Machine Learning
Final Year: Complete Bachelor Thesis and conduct a research project.

Beijing University of Civil Engineering and Architecture
Sep 2018 - Jun 2022 · Undergraduate
B.Eng. in Mechatronics Engineering
Graduated with Best Bachelor Thesis Award
Honors & Awards
[2025] Champion Award (1st place), IEEE ICRA 2025 What Bimanuals Can Do (WBCD) Challenge in Table Services Track.
[2022] Best Bachelor Thesis Award, Beijing Education Commission (top 1% in 130,000 students).
[2022] Silver Award, Beijing Challenge Cup: Entrepreneurial Plan Competition in AI System Track (Rank.2).
Academic Services
Conference Review: NeurIPS’23, CVPR’24, ICRA'24, ICLR'25.
Journal Review: IJCV.